Работа выполнена
в рамках гранта РНФ «Разработка нейроморфной системы управления подводного биоморфного робота». Статья с описанием работы
опубликована в журнале
Physics of Life Reviews (ИФ=11.7).
«Такие исследования очень важны, поскольку являются основой создания нового класса подводных биоморфных аппаратов. Характеристики таких аппаратов, как прогнозируется, будут на порядок превосходить существующие решения по своим функциональным и техническим возможностям. Во-первых, биоморфная форма корпуса, его колебания в водной среде позволяют обеспечивать «оптимизированную эволюцией» высокую энергоэффективность по сравнению с традиционными винтовыми движителями. Во-вторых, биоморфные объекты не создают в подводной среде каких-либо возмущений (физических, персептивных и др.), неестественных для её обитателей. Это позволяет обеспечить возможность не только глубокого мониторинга заданных акваторий, но и управления биоресурсами в их естественных условиях (например, движение стаи «ведущим», отпугивание появлением хищника и др.)», – рассказала доктор физико-математических наук, профессор кафедры нейротехнологий Института биологии и биомедицины ННГУ Сусанна Гордлеева.
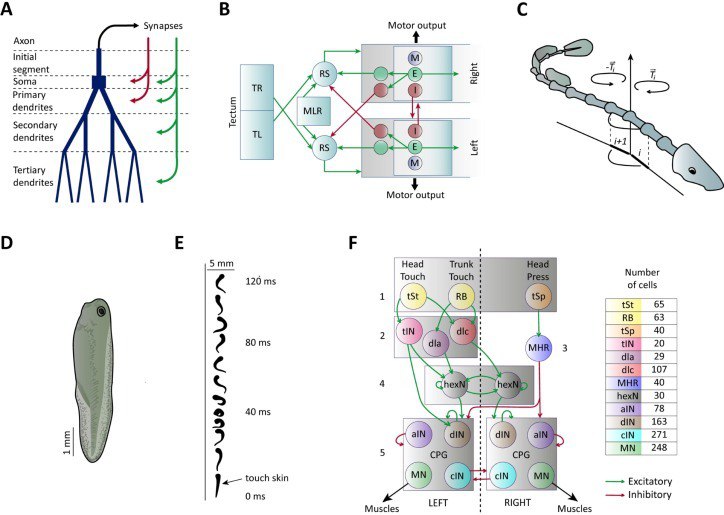
Авторы отмечают, что работа в этом направлении ведётся, начиная с 90-х годов XX века. Исследователи разработали множество механик, позволяющих роботам воспроизводить движения водных организмов. Но для того, чтобы покрыть все вариации движений живых существ в природе, разработанных моделей недостаточно.
Сейчас, благодаря достижениям в области мощных вычислений, искусственного интеллекта, обработки больших данных, интеллектуальных материалов и электроники, появилась возможность создания нового поколения настоящих биомиметических роботов. Эти роботы способны имитировать не только простое передвижение, но и демонстрировать адаптивное двигательное поведение и принятие решений.