




Мягкие роботы, изготовленные на основе гидрогелевых материалов — полимеров, хорошо впитывающих воду, — перспективны для использования в электронных устройствах, датчиках и медицинских приборах. Так, благодаря своим механическим свойствам и биосовместимости мягкие элементы на основе гидрогелей могут применяться при установке имплантатов, для формирования искусственных мышц и электронной кожи, а также при создании микроманипуляторов для хирургии.
Кроме того, если в составе гидрогеля скомбинировать несколько видов материалов, которые будут по-разному изменять свои свойства под воздействием внешних стимулов, например, кислотности среды, температуры, магнитного поля, света или других условий, то можно сделать так, что гидрогель будет двигаться — изгибаться, скручиваться, переворачиваться — то есть добиться сложносоставных движений. Точно настроить «гибкость» гидрогелевых роботов можно с помощью 3D-печати, нанося «узор» из разных материалов с точностью до тысячной доли миллиметра. На данный момент исследователи работают над созданием узоров, позволяющих получать мягких роботов с разными формами и типами движений.
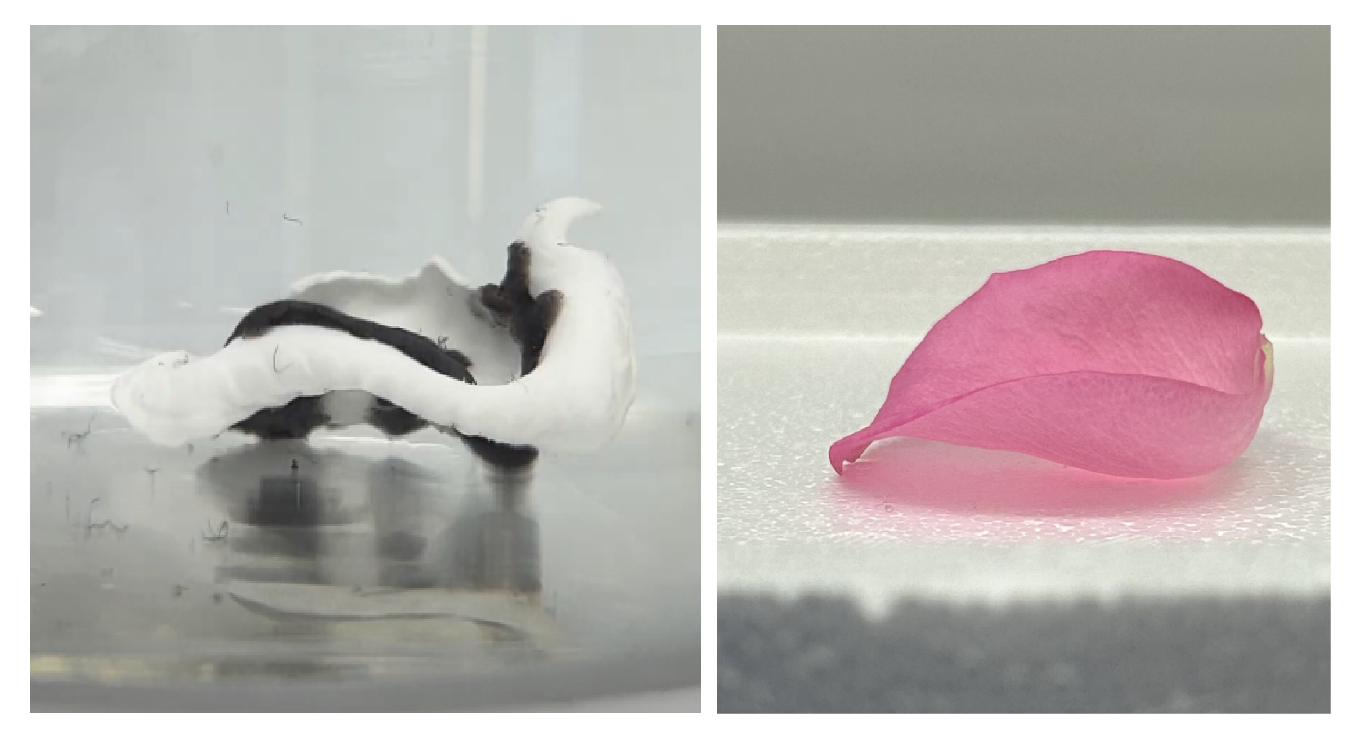
Ученые из Московского государственного технического университета имени Н.Э. Баумана (Москва) и Федерального исследовательского центра проблем химической физики и медицинской химии РАН (Черноголовка) разработали однослойного гидрогелевого робота, который, находясь в воде, может изменять свою форму при температуре, близкой к температуре тела человека (37–40°С). При комнатной температуре робот имеет вид пластинки, а при нагревании сворачивается подобно тому, как это делают листья папоротника или лепестки розы.
Чтобы добиться таких движений, исследователи синтезировали два типа чернил: термочувствительные на основе биосовместимого полимера и магнитные на основе соединений железа. Авторы нанесли чернила на силиконовую подложку, формируя узор в виде плоской 2D-спирали. Готовую гидрогелевую пластинку исследователи поместили на 30 секунд в воду, нагретую до 37°С и имитирующую внутреннюю среду организма человека. Благодаря тому, что один из компонентов гидрогеля был чувствителен к температуре, в таких условиях эта часть гидрогелевого слоя обратимо меняла форму, образовывая 3D-объект заданной структуры, похожий на лепесток розы.
Изменив начальный «узор» со спирали на чередующиеся полосы, исследователи получили робота, по форме напоминающего руку, способную захватывать предметы. Регулируя количество и ширину полос, а также угол их расположения относительно главной оси материала, ученые смогли контролировать степень сворачивания полученных гидрогелевых листков. Чем короче были полосы, тем сильнее изгибался материал. В то же время, благодаря магнитным полосам в составе материала авторы могли перемещать роботов в пространстве, действуя на них магнитом. Способность таким образом передвигать гидрогель позволит точнее контролировать движения хирургических инструментов на его основе. В целом устройства на основе материала, способного одновременно изгибаться и двигаться под действием магнитного поля, найдут широкое применение в микрохирургии, требующей аккуратных захватываний объектов.
«В настоящее время создание мягких манипуляторов для хирургии — актуальная задача. Их можно использовать, например, при установке имплантатов, извлечении тромбов, а также во время операций для перемещения тканей», — отмечает участник проекта, поддержанного грантом РНФ, Анастасия Беляева, инженер Московского государственного технического университет имени Н.Э. Баумана.
«В наших следующих работах мы планируем печатать более сложные узоры и формировать различные типы движений за счет внедрения новых чернил с ионной проводимостью, а также повышать точность 3D-печати», — рассказывает руководитель проекта, поддержанного грантом РНФ, Софья Морозова, кандидат химических наук, старший научный сотрудник Московского государственного технического университет имени Н.Э. Баумана.Если вы хотите стать героем публикации и рассказать о своем исследовании, заполните форму на сайте РНФ